Есть легендарная история, произошедшая в те времена, когда первые паровые машины умели только качать воду из шахты.
Машина тогда делала один цикл за минуту-другую и чтобы переключать цилиндр и паропровод нужен был человек. Туда посадили мальчика, который должен был на каждом такте один рычаг закрывать, а второй открывать. Но мальчишке не охота было сидеть там целый день и раз в минуту делать примитивное действие. И он связал веревочкой два рычага — чтобы машина сама переключала такты.
История это выглядит фантастично. Я не думаю, что инженеры тех времен не понимали что делают и случайно расположили рядом два рычага, да еще и в противофазе. Но как бы не было, а первым регулятором была металлическая тяга между двумя рычагами.
Но время шло, паровые машины совершенствовались и начали набирать обороты…
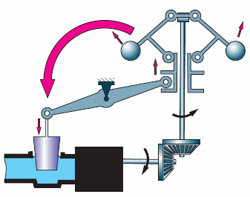 Как бы там ни было, но центробежный регулятор оборотов использовал уже Джеймс Уатт. Принцип действия простой — чем быстрее крутится вал, тем выше расходятся грузы под действием центробежной силы и тем сильнее перекрывается паропровод. Грузы опускаются — паропровод открывается.
Как бы там ни было, но центробежный регулятор оборотов использовал уже Джеймс Уатт. Принцип действия простой — чем быстрее крутится вал, тем выше расходятся грузы под действием центробежной силы и тем сильнее перекрывается паропровод. Грузы опускаются — паропровод открывается.
Что самое интересное — для того, чтобы сделать такой регулятор, не требуется ни высокой точности выполнения, ни даже резьбового соединения!. Сам регулятор можно выточить из меди на ручном токарном станке — и, как показывает опыт Уатта, все будет великолепно работать.
Количество конструктивных выполнений такого простейшего регулятора было велико. Можете полюбоваться на несколько крайних исполнений:

В общем, вещь у Уатта получилась достаточно простая и практичная.
Было в ней парочку недостатков — например, низкая чувствительность регулятора из-за большого трения и низкой точности.
Или нелинейное изменение давления пара. Это когда сначала на каких-то оборотах регулятор очень сильно влиял на поток пара, а при увеличении оборотов регулировка было совсем незаметна. Пока количество оборотов было невелико — все отлично работало. Но когда усовершенствование паровых машин к середине 19 века довело количество оборотов до 250 в минуту — тут все и началось…
Регулятор не мог поймать момент равновесия — он постоянно проскакивал требуемое положение. То есть он то пускал чуть больше пара чем нужно, то чем меньше, и никак не мог поймать золотую середину. Машина начинала дребезжать.
А так как машины стали более быстроходными, то размер и вес грузов пришлось уменьшить. Но технологии уже позволяли делать куда более точные вещи, ставить подшипники и точнее балансировать — и попробовали все эти методы. Результат — стало только хуже. Амплитуда вокруг положения равновесия еще увеличилась, как и частота колебаний давления пара.
После этого чего только не пробовали — решили, что плохо, что рычаги ровные, груз должен двигаться по параболе. Придумали пару десятков конструкций — где груз не просто висит, а катится по специально профилированной чашке или проткнут хитро изогнутыми направляющими. Выглядело красиво, но безрезультатно. Не помогло даже использование воздушного демпфера.
Проблема оказалась в теории управления с обратной связью. В то время не понимали, что если регулятор равномерный, то при переходе равновесного положения он не может не самовозбуждаться (кстати, а среднестатистический попаданец это понимает?).
Когда регуляторы были кондовые, то сила трения и кривизна исполнения это все демпфировали. А качество и точность изготовления сыграли тут отрицательную роль. Редкий случай, однако!
Это поняли в 1867 году (кстати в России, профессором Вышнеградским). С тех пор конструкцию изменили и все заработало.
Сейчас в регуляторах обязательно есть подтормаживающий элемент — где пружина, а где масло, не позволяющие регулятору проскакивать равновесное положение. Вот несколько схем:
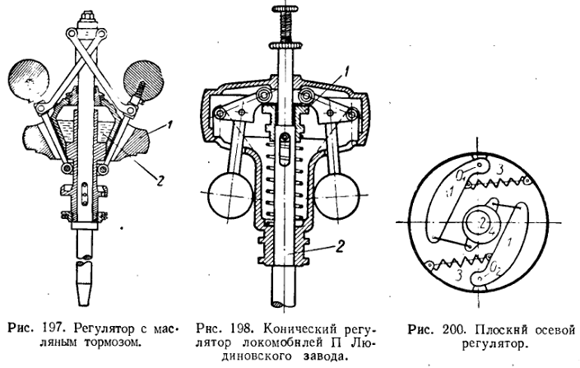
Чаще всего применяются плоские регуляторы (на картинке крайний справа). По крайней мере — для быстроходных машин. Конструкция несложная, больше всего напоминает звонок на старом велосипеде.
В общем, с регуляторами та же ситуация, что и со всем:
Пока мы имеем низкую мощность и малые обороты все работает. Но как только они увеличиваются — количество переходит в качество и требуется либо радикальное изменение принципиальной схемы работы, либо резкое усложнение и удорожание, либо — все вышеперечисленное вместе…
>> вещь у Уатта получилась достаточно простая и практичная
Уатт очень гордился своим конденсатором, механизмом параллельного действия и планарной передачей. Всем встречным и поперечным рассказывал о своей генияльности. Но изобретение регулятора он никогда себе не приписывал. Его юзали на ветряных мельницах еще с 17го века. Просто мельница без регулятора может и обойтись, даже в автоматическом режиме, а паровик нет.
Хорошо, поменяю «запатентовал» на «использовал»
На рисунке три ассоциация не с велосипедным звонком, а автоматом опережения на классике.
Здесь программеры тусуются, не пугайте людей автоматами опережения. 😀
>> груз должен двигаться по праболе
Вы имели в виду параболу?
спасибо, поправил
Третий порядок не пугает?
>Проблема оказалась в теории управления с обратной связью. В то время не понимали, что если регулятор равномерный, то при переходе равновесного положения он не может не самовозбуждаться (кстати, а среднестатистический попаданец это понимает?).
Как раз этот то регулятор не только не равномерен, но имеет рекордный порядок нелинейности среди примитивных — третий. А вот как раз линейные регуляторы отлично работают, не возбуждаясь. Уж поверьте профессионалу. Линейные регуляторы возбуждаются только те, у которых завышен коэффициент обратной связи. А для нелинейных до сих пор нет даже приемлемого методов расчёта за одним исключением — если нелинейность регулятора обратна нелинейности самого объекта. Тогда их можно считать также, как и линейные. Но если объект на столько нелинеен, что это можно адекватно компенсировать нелинейностью регулятора, то линейные регуляторы на него уже не ставят. Но не возбуждаться могут и нелинейные регуляторы, чья нелинейность ничего не компенсирует и ничему не обратна. Просто их выбор и настройка — то ещё искусство.